


“What type of behavioural object would strengthen a couple’s bond and what impact would this object have on the ecosystem of the household?”
Home robots
The most well-known animated objects are automata and their successors, robots. Over the last twenty years, robotics has begun to invade our daily lives through new “service robots”. Within the home, you find robots for remote working, domestic robots (vacuum cleaners and mowers) and security robots. While numerous claims about companion robots were made between 2015 and 2018, it is worth noting that this market has barely grown. Recent studies recognise that the market for these small home robots, the purpose of which was to bring comfort, well-being and company, remains one of the weakest areas of robotics. This is the result of numerous production delays, the discrepancy between user expectations and the reality of the product, and the introduction and rapid expansion of voice-activated virtual assistants [1]. Conversely, functional robots such as robot vacuum cleaners and robotic mowers are a growing market [1].
Between 2006 and 2013, several studies involving the robot vacuum cleaner Roomba were carried out in family homes [2] [3] [4]. These studies showed the effect of this object on the household ecosystem and its impact on human relationships. Longitudinal studies by J-Y Sung et al. [4] and J. Fink et al. [3] highlighted the robot’s different roles (tool, agent, mediator), which evolve over time. They also showed that, by virtue of its presence in the home, the robot changes the dynamics of the household (reorganisation of domestic tasks) and affects social relationships (arguments about housework, subject of conversations between members of the household and visitors). They therefore demonstrate that a non-anthropomorphic object can have a social impact simply because of its ability to move.
This phenomenon was revealed in earlier studies. F. Heider and M. Simmel [5] described how geometric shapes that move within a square frame on a video can make people who watch the video imagine stories between individuals. B. Reeves and C. Nass [6] established through the “media equation” that individuals facing a neutral computer (black-and-white screen showing only text messages) could be polite to this machine. So even an abstract object can trigger social signals. Some recent work on non-anthropomorphic robots validates this result with, for example, an abstract robot [7], an animated door [8] and a behavioural car seat [9].
Based on these findings, the work undertaken is looking at how to approach the subject of moving objects in the context of a connected home: What could these objects be and what impact would they have on the ecosystem of a household?
New retirees as a field of study
The work undertaken falls within the fields of ergonomics and design. These disciplines focus on human beings and, in practice, are often anchored to a field of study. So, in order to study behavioural objects in the context of the connected home and to narrow the field of study, new retirees were chosen as the target; “new” here meaning recently retired.
The selection of this field is of interest due to the fact that retirement causes spouses to suddenly be in continuous proximity with one another in their home. Many upheavals (loss of employment, significant increase in free time, possible loss of social status, loss of routine, possible isolation and communication difficulties between the couple etc.) are destabilising and require changes to restore balance in life [10]. The transition to retirement often involves a reorganisation of daily life and impacts a couple’s relationship [11]. It may also give rise to unhappiness [10]. A degree of congruence of interests and aims is required to maintain conjugal harmony [11].
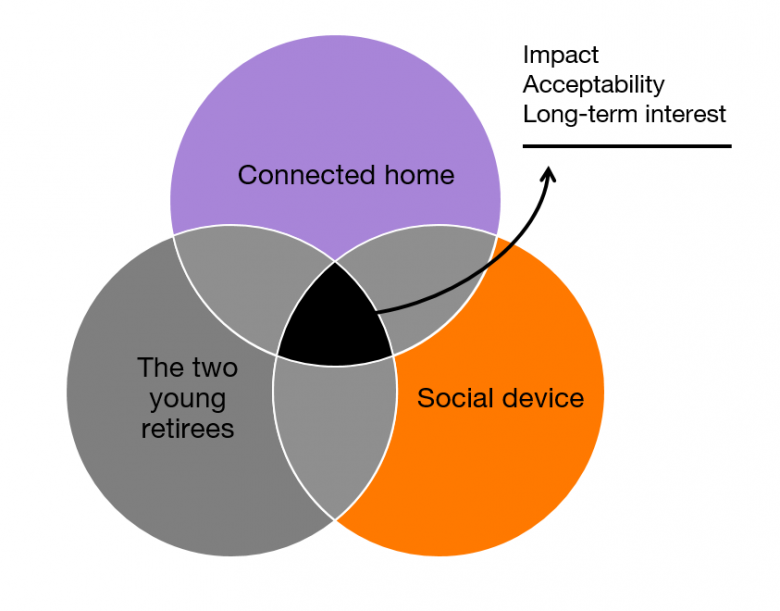
The question of introducing a behavioural object and its role as a vector/mediator during this pivotal period of life may arise to help the couple navigate this major lifestyle change. For this reason, the question underlying this research is: What type of behavioural object would strengthen a couple’s bond and what impact would this object have on the ecosystem of the household?
Our research methodology
A methodology [13] has been developed to address this question. It aims to provide the researcher-designer with a framework that interweaves practical and reflective phases. This research approach consists of four phases clearly inspired by User-Centred Design (UCD), the standard for iterative design processes [14]. However, unlike UCD, the proposed approach does not only aim to create a product or service; it is also intended to increase understanding of the impact of a behavioural object on the ecology of the user, and the findings to be drawn from this.
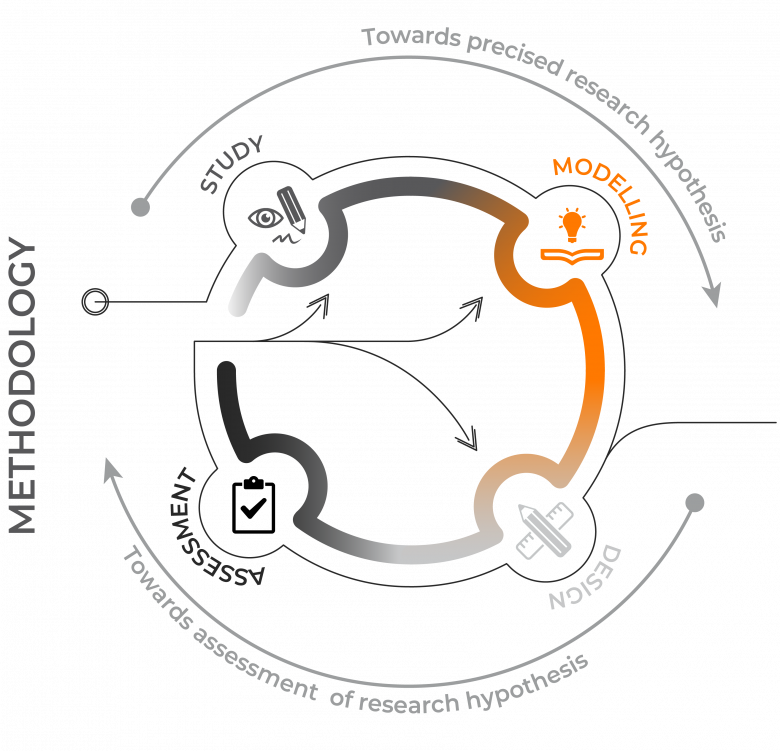
To measure this impact, it is necessary to understand the situation before and after the behavioural object enters the observed environment. So, the first phase of the proposed methodology is the “study” phase, whereby the environment is observed without the behavioural object. Everything begins, therefore, with observation — a key step to understanding a context, an over-arching ecosystem with the full wealth of experiences that this encompasses, in order to understand the situation in the most detail possible. In practice, two field studies were conducted in five households for this project.
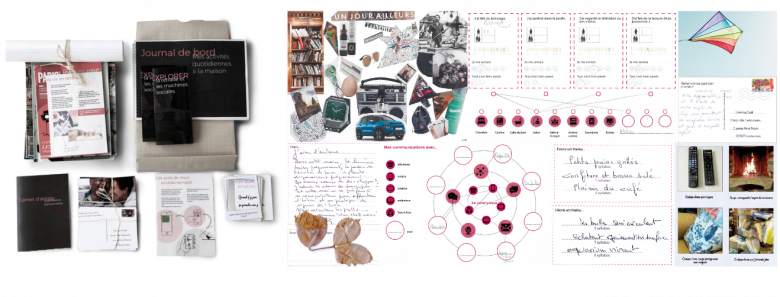
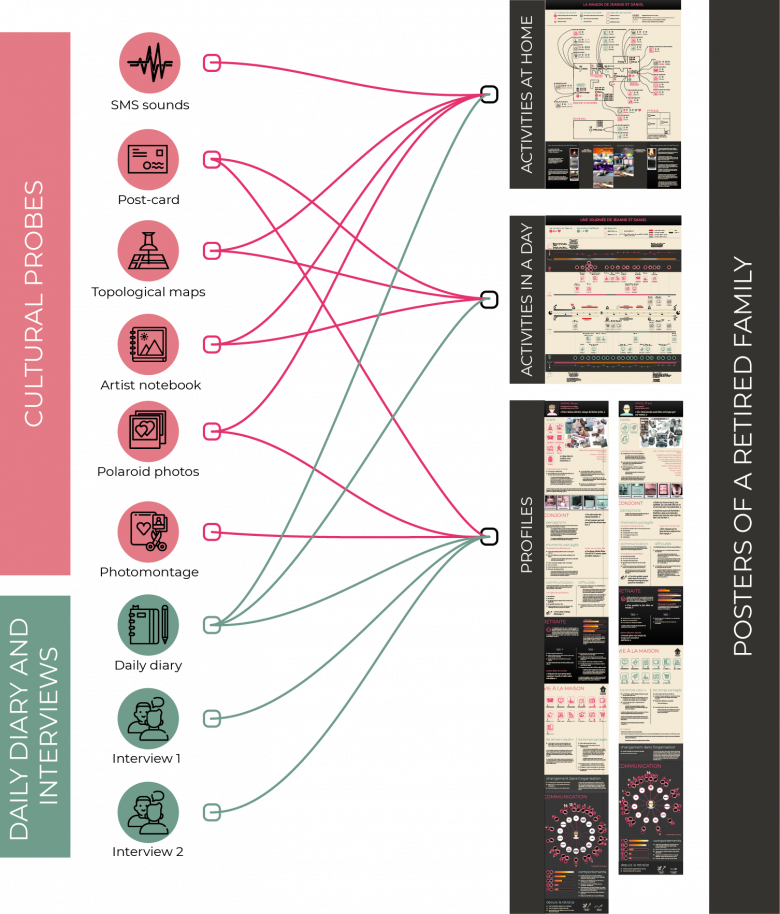
The first study, which lasted two weeks, focused on understanding the activities and lives of the new retirees in their homes. The aim was to gain insight into the relationship that members of the household have with their homes and everyday objects, the activities carried out in the household alone or as a couple, and the interactions that members of the household have with each other and with the outside world. To obtain this information, a data collection protocol was established using various tools. An initial interview was conducted at the beginning of the study to learn about the participants from the point of view of their retirement, and how they were spending it at home. This meeting was an opportunity to introduce the participants to the tools that would be used during the two-week study. In order to more accurately identify the activities carried out within the home and the two spouses’ communications, the participants had to complete a daily logbook to individually and systematically collect information on the activities carried out during the day. To obtain more subjective data and to empathise more directly with participants by collecting fragments of thoughts, emotions and dreams, tools that are more fun and creative were created in the form of cultural probes [15]. As a result, participants were able to write postcards, take photos and record sounds, but also to make photo montages, write poems or add stickers, all in relation to their lives and their homes. This tangible format for collecting information by engaging the participants in manual writing and creative activities made it possible to collect more sensitive and expressive data.
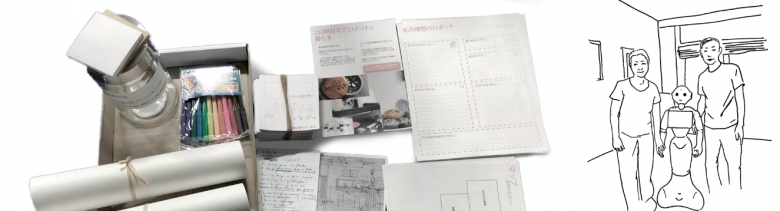
The second study aimed to find out how a moving object was perceived in these same households. To do this, research was carried out and Softbank’s robot Pepper was placed in the previously studied households for two days. The objective was not to check the relevance of the functions offered by the robot (taking photos, suggesting workouts, providing information etc.), but to identify how an object that can move, speak or emit sounds at any time and of its own accord, is perceived by the participants in their own home. As with the first study, various tools were devised to capture participants’ perceptions and opinions. Using a photo montage and a creative tool, they were able to express their thoughts on the ideal robot for their daily lives. They had small cards that they could use to describe the experiences that they had with Pepper. An ideas jar allowed them to suggest improvements or describe their ideas in response to their experiences with the robot. When the team came to collect the robot, the participants answered questions about their overall experience in a closing interview.
The next stage—the “modelling” phase—aims to collect and structure the data collected in the previous phase in such a way that gives it meaning, thus allowing team members who were not present to gain a sense of the atmosphere and life of the users in their ecosystem, to depict the observed ecosystem in a way that enables understanding of its dynamics, and to identify a roadmap for preparing the design of a behavioural object that will be placed and studied in the households. The aim of this phase is to take stock of the information gathered in order to offer findings that can provide a basis for suggestions for improvements, or even for projections of ideal scenarios for making the world more habitable.
For example, a tool called “empathic windows” was devised to graphically combine and model the data of a household using the set of data gathered during the first field study. Each household is described in four posters: two to describe the couple, one to describe the activities carried out in a day, and the last to understand the household’s atmosphere and which activities were carried out in each room of the home. This tool proved to be very powerful in empathising with the lives of the couples who took part in the study. It helped the researchers to understand, among other things, the importance of balancing shared time with individual activities, to emphasise that the presence of the other sometimes does not prevent a feeling of loneliness and to note the importance of maintaining a network of relationships (family, friends, former colleagues).
Concerning the Pepper robot study, beyond the use and usability angle that was not the focus of the research, the results show that the participants want the object not to be too big, but to be visible so that they can interact with it. They are interested in an object that enhances their comfort and they appreciate being able to touch the robot. The fact that the object is humanoid and able to speak is appreciated, but, as is often noted in studies [16] [17], the discrepancy between the appearance, which indicates that the robot can speak, and the robot’s actual capabilities causes only frustration and dissatisfaction. Another point that agreed with the literature [18] [19] is the need for users to be able to control the machine, which should exist only to respond to requests.
Thanks to the two studies carried out, the project gathered a lot of information that guides the design towards a non-vocal behavioural object that is unobtrusive but surprising and based on an everyday object.
In the “design” phase, the researcher-designer aims to develop a solution based on the specifications identified in the previous phase and the results to be achieved for the research question. The whole phase fully implements the “design culture” to design a service anchored in the ecosystem studied and which, for this project, concerns a behavioural object.
The final stage—the “evaluation” phase—is intended to prepare the experimental protocol that can be used to answer the research question by placing the behavioural object designed in the previous phase in the ecosystem studied.
Conclusion
This article presents the first part of the work carried out with the aim of understanding the impact of a behavioural object in a connected household. Work is ongoing, using the observations collected in the first phase and the data analysed in the second phase of the methodology. A behavioural object is being developed after having been designed via a process that will be the subject of the next article. Finally, the preparation of the experiment has been initiated and aims to evaluate the behavioural object in context in eight retiree households over five weeks. These results will also be the subject of a future article.
References
[1] Michael Larner. 2019. Consumer robotics – Sector analysis, leadings innovators & market forecasts 2019-2024. Juniper research, United Kingdom.
[2] Julia Fink, Valérie Bauwens, Frédéric Kaplan, Pierre Dillenbourg. 2013. Living with a vacuum cleaning robot. International Journal of Social Robotics, 5(3), 389–408.
[3] Jodi Forlizzi and Carl DiSalvo. 2006. Service robots in the domestic environment: a study of the roomba vacuum in the home. In proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, 258 265.
[4] Ja-Young Sung, Rebecca E. Grinter, Henrik I. Christensen. 2010. Domestic Robot Ecology. In International Journal of Social Robotics, 2 (4), 417-429.
[5] Fritz Heider and Marianne Simmel. 1944. An Experimental Study of Apparent Behavior. The American Journal of Psychology, 57(2), 243–259. https://www.youtube.com/watch?v=wp8ebj_yRI4
[6] Byron Reeves and Clifford Nass. 1996. The media equation: how people treat computers, television, and new media like real people and places. Cambridge University Press, 1996.
[7] Lucy Anderson-Bashan, Benny Megidish, Hada Erel, Iddo Wald, Andrey Grishko, Guy Hoffman, Oren Zuckerman. 2018. The greeting machine: an abstract robotic object for opening encounters. In Proceedings of the 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 595-602.
[8] Wendy Ju and Leila Takayama. 2009. Approachability: how people interpret automatic door movement as gesture. International Journal of Design, 3(2).
[9] Hamish Tennent, Dylan Moore, Wendy Ju. 2018. Character actor: design and evaluation of expressive robot car seat motion. In proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 1(4), 1-23.
[10] Vincent Caradec. 2017. L’épreuve de la retraite Transformations sociétales, expériences individuelles. Nouvelle Revue de Psychosociologie, 1(23), 17–29.
[11] Jean-Baptiste Dayez. 2013. Le couple à l’heure de la retraite. Analyse Énéo.
[12] Stéphane Vial: 2010. Court traité du design, in Que sais-je, Presses universitaires de France.
[13] Dominique Deuff, Ioana Ocnarescu, Enrique Coronado, Liz Katherine Rincon Ardila, Isabelle Milleville, Gentiane Venture. 2020. Designerly way of thinking in a robotics research project. Journal of the Robotics Society of Japan, 38(8), 692-702.
[14] ISO 9241-210. 2019. Ergonomics of human-system interaction — Part 210: Human-centred design for interactive systems.
[15] Bill Gaver, Tony Dunne, et Elena Pacenti. 1999. Design : Cultural probes. interactions 6(1), 21-29.
[16] Jennifer Goetz, Sara Kiesler et Aaron Powers. 2003. Matching robot appearance and behavior to tasks to improve human-robot cooperation. Proceedings of the International Workshop on Robot and Human Interactive Communication ROMAN 2003, 55-60.
[17] Kerstin Dautenhahn. 2002. Design spaces and niche spaces of believable social robots. Proceedings of the 11th IEEE International Workshop on Robot and Human Interactive Communication, 192-197.
[18] Astrid Marieke Von Der Pütten, Nicole C. Krämer, et Sabrina C. Eimler 2011. Living with a robot companion – Empirical study on the interaction with an artificial health advisor. Proceedings of the 2011 ACM International Conference on Multimodal Interaction, 327–334.
[19] De Graaf, Ben Allouch, et Van Dijk. 2017. Why Do They Refuse to Use My Robot?: Reasons for Non-Use Derived from a Long-Term Home Study. International Conference on Human-Robot Interaction, 224–233.





