


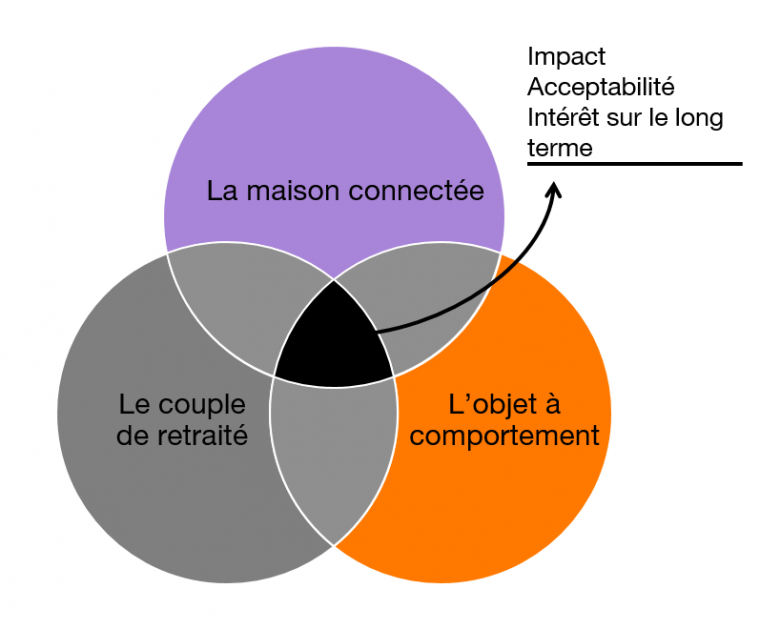
“Que pourrait être un objet à comportement qui resserrerait les liens d’un couple, et quel impact aurait-il sur l’écosystème du foyer ?”
Les robots de la maison
Les premiers objets animés les plus connus sont les automates ainsi que leurs successeurs, les robots. Depuis une vingtaine d’année, la robotique a commencé à investir notre quotidien au travers de nouveaux robots avec les robots dits de service. Dans le cadre de la maison, il est possible de trouver les robots de télé-présence, les robots domestiques (aspirateur et tondeuse) et de surveillance. Si dans les années 2015-2018, de nombreuses annonces ont été faites concernant les robots compagnons, force est de noter que le marché s’est peu développé. Des études récentes reconnaissent que le marché de ces petits robots de la maison dont le but était d’apporter confort, bien-être et compagnie, reste un des segments les plus bas de la robotique. Ceci est la conséquence de nombreux retards de production, de l’écart entre l’attente des utilisateurs et la réalité du produit, ainsi que de l’arrivée et l’essor rapide des assistants vocaux [1]. En revanche, les robots fonctionnels tels que les robots aspirateurs et les robots tondeuses constituent un marché en pleine croissance [1].
Entre 2006 et 2013, plusieurs études dans les habitations de familles ont été menées sur le robot aspirateur Roomba [2] [3] [4]. Ces études ont montré l’influence de cet objet sur l’écosystème du foyer et son impact sur les relations humaines. Les études longitudinales de J-Y Sung et al. [4] et J. Fink et al. [3] ont mis en évidence les divers rôles du robot (outil, agent, médiateur) qui évoluent au cours du temps. Elles ont aussi montré que, de par sa présence dans la maison, le robot modifie l’équilibre du foyer (réorganisation des tâches domestiques) et impacte les relations sociales (discussions relatives au ménage, sujet des conversations entre membres du foyer et vis-à-vis des personnes extérieures). Elles démontrent ainsi qu’un objet non anthropomorphique peut engendrer des impacts sociaux du simple fait de sa capacité à se mouvoir.
Ce phénomène a été révélé par des études antérieures. F. Heider et M. Simmel [5] ont décrit que des formes géométriques qui se déplacent dans un cadre carré sur une vidéo peuvent faire imaginer des histoires entre individus, par des personnes qui regardent cette vidéo. B. Reeves et C. Nass [6] ont établi par le biais de “l’équation médiatique” que des individus faisant face à un ordinateur neutre (écran noir et blanc ne présentant que des messages textuels) pouvaient être polis envers cette machine. Ainsi, même un objet abstrait peut provoquer des signaux sociaux. Certains travaux récents sur les robots non anthropomorphes valident ce résultat avec, par exemple, un robot abstrait [7], une porte animée [8], un siège de voiture à comportement [9].
C’est sur la base de ces enseignements que les travaux engagés recherchent la façon d’aborder les objets en mouvement dans le cadre de la maison connectée : quels pourraient être ces objets et quels impacts auraient-ils sur l’écosystème d’un foyer ?
Un terrain d’étude : les jeunes retraités
Les travaux entrepris s’inscrivent dans le cadre de l’ergonomie et du design. Ces disciplines se focalisent sur l’humain et, dans la pratique, sont souvent ancrées sur un terrain d’étude. Aussi, afin d’étudier les objets à comportement dans le cadre de la maison connectée et pour restreindre le champ d’étude, la cible des jeunes retraités a été choisie ; “jeunes” étant pris dans le sens de retraités depuis peu.
Le choix de ce terrain présente un intérêt du fait que la période de la retraite amène les conjoints à partager soudainement une proximité continue dans leur maison. De nombreux bouleversements (perte d’emploi, augmentation importante du temps libre, éventuelle perte de positionnement social, perte d’une vie rythmée, possibles isolement et difficultés de communication au sein du couple, etc.) déstabilisent et nécessitent des remaniements dans l’existence pour retrouver un équilibre dans la vie [10]. Le passage à la retraite implique souvent une réorganisation de la vie quotidienne et impacte la relation du couple [11]. Le passage à la retraite peut donner lieu à des insatisfactions [10]. Il est nécessaire d’avoir une certaine “congruence d’intérêts et d’objectifs” pour maintenir la satisfaction conjugale [11].
La question de l’introduction et du rôle d’un objet à comportement en tant que vecteur/médiateur à cette période charnière de la vie peut se poser pour aider le couple à franchir cette étape de changement de vie. C’est pourquoi la problématique qui sous-tend ces travaux de recherche questionne ce que pourrait être un objet à comportement qui resserrerait les liens d’un couple, et quel impact il aurait sur l’écosystème du foyer ?
Notre méthodologie de recherche
Afin de répondre à cette problématique, une méthodologie [13] a été élaborée. Elle vise à fournir au chercheur-designer un cadre imbriquant des phases de pratique et des phases réflexives. Cette approche de recherche se compose de quatre phases clairement inspirées de la Conception Centrée Utilisateurs (CCU), norme de processus de conception itérative [14]. Mais contrairement à la CCU, l’approche proposée n’a pas seulement pour visée la réalisation d’un produit ou service, elle a également l’objectif de comprendre l’impact d’un objet à comportement dans l’écologie de l’usager, et les enseignements à en tirer.
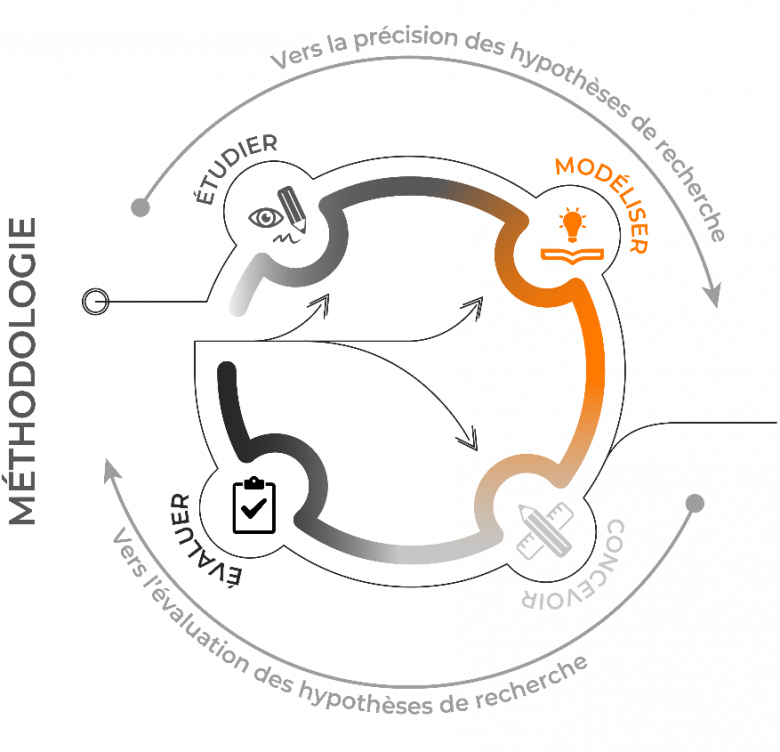
Pour mesurer cet impact, il est nécessaire de comprendre la situation avant et après l’introduction de l’objet à comportement dans l’environnement observé. Ainsi, la première phase de la méthodologie proposée est la phase “étudier” afin d’observer cet environnement sans l’objet à comportement. C’est donc par l’observation qui est une étape centrale pour comprendre un contexte, un écosystème global, avec toute la richesse des expériences qui y sont vécues, afin d’en avoir une compréhension la plus fine possible, que tout commence. En pratique, dans le projet, deux études ont été réalisées sur le terrain auprès de cinq foyers.
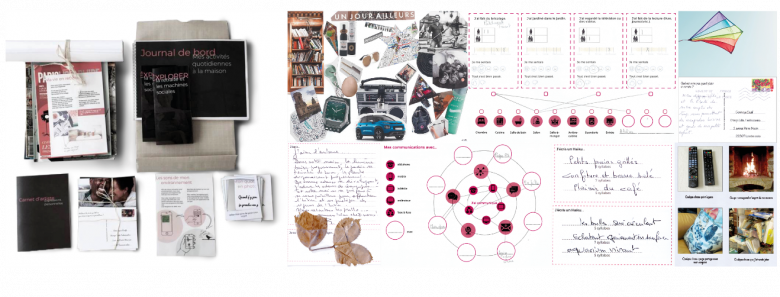
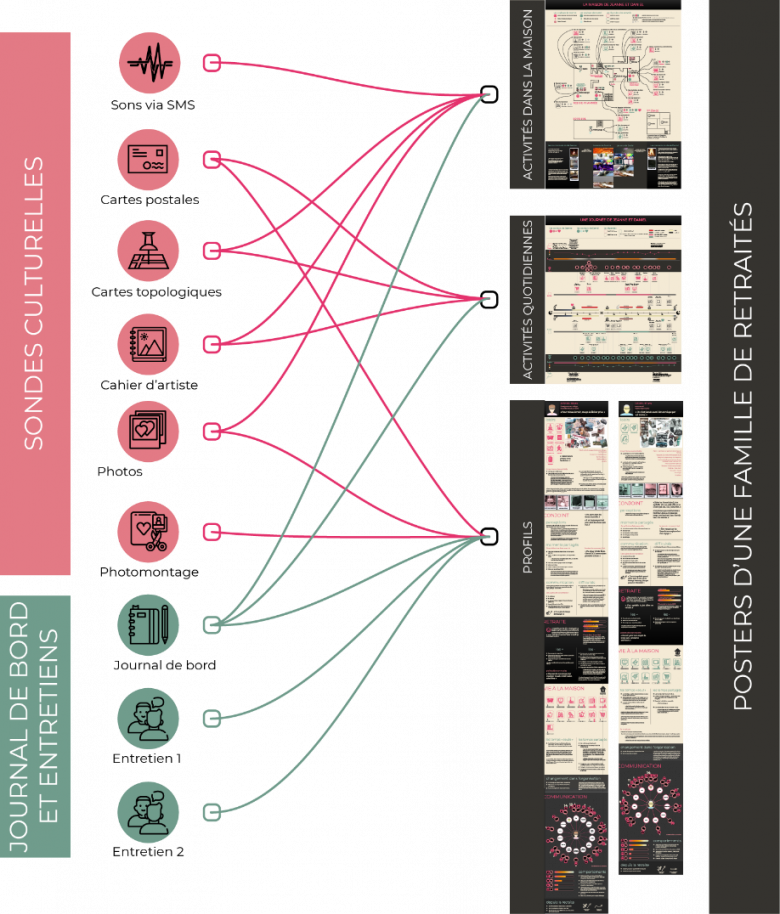
La première étude de deux semaines porte sur la compréhension des activités et de la vie de jeunes retraités dans leur habitation. L’objectif était de se représenter la relation que les membres du foyer entretiennent avec leur maison et les objets de leur quotidien, les activités réalisées au sein du foyer en solitaire ou à deux, et les interactions qu’ont les membres du foyer entre eux et avec l’extérieur. Pour disposer de ces informations, un protocole de recueil de données a été construit sur la base d’outils variés. Un premier entretien a été mené en début d’étude dans but de connaitre les participants du point de vue de leur retraite, et la façon dont ils la vivent chez eux. Ce point de rencontre a été l’occasion de leur présenter les outils à appliquer durant les deux semaines de l’étude. Pour identifier plus finement les activités réalisées au sein de la maison, et les actions de communication des deux conjoints, les participants devaient en effet remplir quotidiennement un journal de bord permettant le recueil individuel et systématique des activités réalisées dans la journée. Afin d’obtenir des données d’ordre plus subjectif et entrer plus directement en empathie avec les participants, en recueillant des fragments de pensées, d’émotions, ou de rêves, des sondes culturelles [15], outils plus amusants et créatifs, ont été constituées. Ainsi, les participants ont pu écrire des cartes postales, prendre des photos, enregistrer des sons mais également, réaliser des photomontages, écrire des poèmes ou coller des gommettes, et tout cela en rapport avec leur vie et leur maison. Le format tangible de collecte des informations à travers l’écriture manuelle et la créativité des participants a renforcé le côté sensible et expressif des données recueillies.
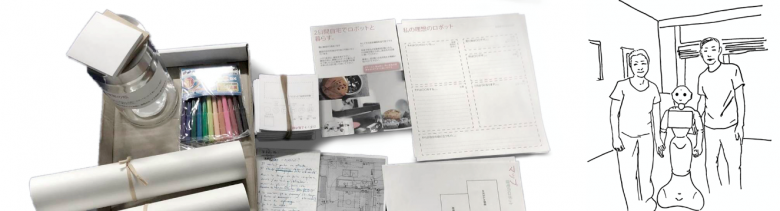
La seconde étude visait à déterminer comment était perçu un objet en mouvement dans ces mêmes foyers. Pour cela, une exploration a été montée et le robot Pepper de Softbank a été placé deux jours dans les foyers précédents. L’objectif n’était pas de vérifier la pertinence des fonctions proposées par le robot (prendre des photos, proposer de la gym, donner des informations, etc.), mais d’identifier la façon dont un objet qui peut bouger, qui peut parler ou émettre des sons, à tout moment, et de sa propre initiative, est perçu par les participants dans leur habitation propre. Comme pour la première étude, divers outils ont été imaginés afin de récolter les perceptions et avis des participants. À travers un photomontage et un outil créatif, ils ont pu s’exprimer sur le robot idéal dans leur quotidien. Ils disposaient de petites cartes permettant de décrire les expériences qu’ils vivaient avec Pepper. Un bocal à idées leur permettait de proposer des améliorations ou de décrire des visions en réaction aux expériences vécues avec le robot. Lorsque l’équipe est venue récupérer le robot, les participants répondaient à des questions concernant leur expérience globale à travers un entretien final.
La phase suivante, la phase “modéliser” vise à rassembler et structurer les données collectées dans la phase précédente pour leur donner du sens afin, de permettre aux membres de l’équipe n’ayant pas été sur le terrain de ressentir l’atmosphère et la vie des usagers dans leur écosystème, de représenter l’écosystème observé pour en comprendre la dynamique, et d’identifier un cahier des charges pour préparer la conception d’un objet à comportement qui sera placé et étudié dans les foyers. C’est une phase dont le but est de faire le point sur les connaissances acquises pour offrir un socle d’enseignements sur lequel poser des prescriptions d’amélioration de la situation, voire de projeter des visions idéales pour une meilleure habitabilité du monde.
Ainsi, il a été imaginé un outil appelé “fenêtres empathiques” réunissant et modélisant les données d’un foyer de façon graphique à partir de l’ensemble des données issues du premier terrain. Chacun foyer est décrit sous forme de quatre posters : deux pour décrire le couple, un pour décrire les activités réalisées dans une journée et le dernier pour comprendre les activités réalisées dans chaque pièce de la maison et l’atmosphère du foyer. Cet outil s’est avéré très puissant pour entrer en empathie avec la vie des couples qui ont participé à l’étude. Il a permis de comprendre entre autre, l’importance de l’équilibre entre les temps partagés et les activités personnelles, de mettre en avant que la présence de l’autre n’empêche pas parfois le sentiment de solitude, de noter l’importance du maintien du réseau relationnel (famille, amis, anciens collègues).
Concernant l’étude sur le robot Pepper, au-delà de l’aspect usage et utilisabilité qui n’étaient pas le focus de la recherche, les résultats montrent que les participants souhaitent que l’objet ne soit pas trop grand, mais soit visible pour interagir avec lui. Ils portent un intérêt à un objet contribuant à leur confort, et ont apprécié le fait de pouvoir toucher le robot. Le fait que l’objet soit humanoïde et puisse parler est apprécié mais, comme cela est souvent noté dans les études [16] [17], le décalage entre l’apparence qui laisse à donner que le robot puisse parler et ses capacités réelles n’apporte que frustration et insatisfaction. Un autre point en accord avec la littérature [18] [19], c’est le besoin de contrôle des usagers envers la machine, celle-ci ne devant exister que pour répondre à la demande.
Grâce aux deux études réalisées, le projet a acquis de nombreuses connaissances pour orienter la conception vers un objet à comportement, non vocal, basé sur un objet du quotidien, discret mais surprenant
Dans la phase “concevoir”, le chercheur-designer vise à élaborer une solution en fonction des spécifications identifiées lors de la phase précédente et des résultats à atteindre pour la question de recherche. Toute cette phase met pleinement en œuvre la “culture design” dans le but de concevoir un service ancré dans l’écosystème étudié, et qui, pour le projet, concerne un objet à comportement.
La dernière phase, la phase “évaluer”, a pour but de préparer le protocole d’expérimentation qui permettra de répondre à la question de recherche, en mettant dans l’écosystème étudié, l’objet à comportement conçu dans la phase précédente.
Conclusion
Cet article a présenté les premiers travaux réalisés dans le but de comprendre l’impact d’un objet à comportement dans un foyer connecté. À travers les observations recueillies dans la première phase et les données analysées dans la deuxième phase de la méthodologie, les travaux se sont poursuivis. Un objet à comportement est en cours de développement après avoir été conçu au travers d’un processus de design qui sera le sujet du prochain article. Enfin, la préparation de l’expérimentation a été lancée et vise à évaluer l’objet à comportement en contexte dans huit foyers de retraités durant cinq semaines. Ces résultats feront également l’objet d’un futur article.
Références
[1] Michael Larner. 2019. Consumer robotics – Sector analysis, leadings innovators & market forecasts 2019-2024. Juniper research, United Kingdom.
[2] Julia Fink, Valérie Bauwens, Frédéric Kaplan, Pierre Dillenbourg. 2013. Living with a vacuum cleaning robot. International Journal of Social Robotics, 5(3), 389–408.
[3] Jodi Forlizzi and Carl DiSalvo. 2006. Service robots in the domestic environment: a study of the roomba vacuum in the home. In proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, 258 265.
[4] Ja-Young Sung, Rebecca E. Grinter, Henrik I. Christensen. 2010. Domestic Robot Ecology. In International Journal of Social Robotics, 2 (4), 417-429.
[5] Fritz Heider and Marianne Simmel. 1944. An Experimental Study of Apparent Behavior. The American Journal of Psychology, 57(2), 243–259. https://www.youtube.com/watch?v=wp8ebj_yRI4
[6] Byron Reeves and Clifford Nass. 1996. The media equation: how people treat computers, television, and new media like real people and places. Cambridge University Press, 1996.
[7] Lucy Anderson-Bashan, Benny Megidish, Hada Erel, Iddo Wald, Andrey Grishko, Guy Hoffman, Oren Zuckerman. 2018. The greeting machine: an abstract robotic object for opening encounters. In Proceedings of the 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 595-602.
[8] Wendy Ju and Leila Takayama. 2009. Approachability: how people interpret automatic door movement as gesture. International Journal of Design, 3(2).
[9] Hamish Tennent, Dylan Moore, Wendy Ju. 2018. Character actor: design and evaluation of expressive robot car seat motion. In proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 1(4), 1-23.
[10] Vincent Caradec. 2017. L’épreuve de la retraite Transformations sociétales, expériences individuelles. Nouvelle Revue de Psychosociologie, 1(23), 17–29.
[11] Jean-Baptiste Dayez. 2013. Le couple à l’heure de la retraite. Analyse Énéo.
[12] Stéphane Vial: 2010. Court traité du design, in Que sais-je, Presses universitaires de France.
[13] Dominique Deuff, Ioana Ocnarescu, Enrique Coronado, Liz Katherine Rincon Ardila, Isabelle Milleville, Gentiane Venture. 2020. Designerly way of thinking in a robotics research project. Journal of the Robotics Society of Japan, 38(8), 692-702.
[14] ISO 9241-210. 2019. Ergonomics of human-system interaction — Part 210: Human-centred design for interactive systems.
[15] Bill Gaver, Tony Dunne, et Elena Pacenti. 1999. Design : Cultural probes. interactions 6(1), 21-29.
[16] Jennifer Goetz, Sara Kiesler et Aaron Powers. 2003. Matching robot appearance and behavior to tasks to improve human-robot cooperation. Proceedings of the International Workshop on Robot and Human Interactive Communication ROMAN 2003, 55-60.
[17] Kerstin Dautenhahn. 2002. Design spaces and niche spaces of believable social robots. Proceedings of the 11th IEEE International Workshop on Robot and Human Interactive Communication, 192-197.
[18] Astrid Marieke Von Der Pütten, Nicole C. Krämer, et Sabrina C. Eimler 2011. Living with a robot companion – Empirical study on the interaction with an artificial health advisor. Proceedings of the 2011 ACM International Conference on Multimodal Interaction, 327–334.
[19] De Graaf, Ben Allouch, et Van Dijk. 2017. Why Do They Refuse to Use My Robot?: Reasons for Non-Use Derived from a Long-Term Home Study. International Conference on Human-Robot Interaction, 224–233.






