

Le train autonome : un concentré de technologie pour développer le train du futur.
Les trains embarquent déjà un système d’assistance à la conduite et des outils d’intelligence artificielle, notamment pour le contrôle de la vitesse, et de nombreux capteurs équipent également les voies. Quels sont les différents systèmes à bord du train autonome et quel changement de paradigme annoncent-ils ?
Aujourd’hui, les trains de la SNCF embarquent ce que l’on appelle un système de protection automatique des trains (Automatic Train Protection ou ATP), qui permet de contrôler que le conducteur reste dans une plage de vitesse compatible avec la sécurité. Si cette vitesse est dépassée, l’ATP arrête le train en urgence. Mais c’est au conducteur d’adapter la vitesse par rapport au train qui le précède : l’ATP calcule simplement la courbe de ralentissement du train lorsque celui-ci doit s’arrêter à un feu rouge. Il s’agit d’un système électronique doté d’un calculateur de courbes de vitesse, et non d’une intelligence artificielle ‒ du moins, pas au sens de la technologie de deep learning. Selon les générations de trains, cet équipement est plus ou moins sophistiqué. De son côté, le système de signalisation matérialisé par des feux tricolores, qui permet au train de se positionner par rapport aux autres trains et aux points dangereux sur le réseau, comme les aiguillages, est de plus en plus efficace et de plus en plus digitalisé.
Et demain ?
Demain, avec le train autonome, le train conduira seul, sans assistance humaine in situ : la décision d’accélérer et de freiner sera prise par le train ‒ ce qui n’empêche pas de conserver l’ATP, notre système de protection et de contrôle. L’ambition est d’exploiter progressivement des trains équipés de différents niveaux d’automatisme (voir vidéo ci-dessous). Les capteurs et l’intelligence de conduite seront embarqués essentiellement à bord et non au sol (les rails ou abords de la voie), afin de faciliter la transition : le passage d’un modèle à l’autre se fera sur plusieurs décennies, un délai pendant lequel on ne souhaite pas modifier profondément l’infrastructure. Pourquoi ? Tout d’abord parce que le coût marginal de notre premier train autonome serait, dans ce cas, bien trop important. Par ailleurs, pendant cette longue période de transition, nous souhaitons faire circuler sur une même infrastructure des trains à conduite manuelle et des trains autonomes à niveau d’automatisme 2, 3 ou 4, les uns après les autres et aléatoirement. Nos trains autonomes doivent donc pouvoir circuler en s’adaptant aux infrastructures (voie ferrée, équipements de signalisation…) construites pour les trains à conduite manuelle.
La géolocalisation et la détection des obstacles jouent un rôle important dans l’autonomisation des trains. Quels sont les défis techniques restant à relever dans ces domaines ?
Ces dernières années, l’utilisation de trains autonomes en circuit fermé s’est banalisée, à l’instar de la ligne 14 du métro parisien. En revanche, la circulation de trains autonomes reste un défi en milieu ouvert. Dans un milieu fermé, on considère que l’environnement est sûr, sans obstacle sur l’infrastructure. En revanche, dans un milieu ouvert, l’environnement extérieur nécessite un niveau de surveillance élevé, ce qui rend les tâches beaucoup plus complexes.
Si l’on souhaite que des trains autonomes circulent sans modifier les infrastructures existantes, il est nécessaire que les trains sachent se positionner de façon exacte sur les rails ou le quai. Aujourd’hui, la localisation du train est remontée de deux façons : par la connaissance empirique que les conducteurs ont de leur ligne, d’une part, et d’autre part via les cantons, un découpage des voies allant de 500 m à 40 km. Dans ce système de géolocalisation par circuit de voie, le train shunte le circuit en roulant, et de là, le système de signalisation est capable de détecter dans quel canton il se situe avec une précision d’un kilomètre.
Demain, pour anticiper par exemple l’arrivée d’un feu rouge, le train autonome devra pouvoir lire la signalisation et se positionner précisément dans son canton, ce qui nécessite une géolocalisation de l’ordre du mètre. On change donc complètement de technologie en fusionnant les capteurs d’une centrale inertielle et d’un GPS. Des accéléromètres seront capables d’enregistrer les variations de position, et seront recadrés régulièrement avec une position GPS pour vérification.
Le premier défi serait donc la détection de la signalisation…
Exactement. Les tout derniers systèmes installés sur la signalisation envoient déjà les informations numérisées à bord du train, ce qui simplifie la conduite automatique. Mais lorsqu’on est sur un système plus ancien avec des feux de signalisation, il est indispensable de prendre en compte ce qu’ils indiquent. C’est un challenge ambitieux que nous sommes en train de relever, notamment grâce à une caméra capable d’extraire, d’analyser et d’interpréter l’image des feux dans le paysage.
Au moyen d’une intelligence artificielle ?
Sur la signalisation latérale comme sur la détection des obstacles, nous exigeons un tel niveau de sécurité que nous ne pouvons pas faire appel à la technologie de deep learning : s’appuyer sur un modèle statistique demanderait de réaliser trop d’essais. En revanche, l’intelligence artificielle est utilisée pour la surveillance de l’environnement du train. La caténaire par exemple, qui permet l’alimentation en courant électrique du train, peut être surveillée par une intelligence artificielle, car en cas d’erreur de sa part, les dégâts resteraient limités : en effet, le train arracherait simplement la caténaire et s’arrêterait sans causer d’accident.
Et qu’en est-il de la détection des obstacles ?
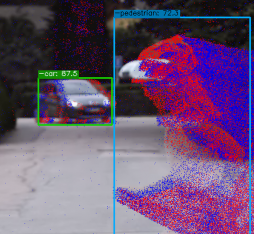
Nous avons deux grands enjeux : la distance moyenne et la distance longue. La distance moyenne, de l’ordre de 200 m, correspond à la distance de détection des obstacles pour les voitures : nous nous sommes donc inspirés de la technologie utilisée dans le domaine de l’automobile. Cependant, un train freine beaucoup plus lentement qu’une voiture, nous avons donc besoin d’une seconde détection à plus longue distance (800 m ou 1 km), ce qui est aussi un défi technologique à relever. On recherche enfin une meilleure définition de la surface des obstacles afin que le train ne s’arrête pas, par exemple, pour une feuille morte sur la voie. In fine, la levée de doute reste assurée par le superviseur du train (qui sera dans un centre de contrôle au sol).
On a entendu parler du train piloté à distance comme d’une étape vers le train autonome. Qu’en est-il ?
Concernant le train téléconduit, que l’on appelle aussi train-drone, nous devrions avoir un premier démonstrateur avant l’été. Cette expérimentation présente deux intérêts : il s’agit en premier lieu d’un mode dégradé du train autonome, ce qui signifie qu’un train autonome en panne sera pris en main à distance pour être conduit jusqu’à la gare suivante. La conduite à distance sera également employée pour des parcours techniques, entre le dépôt et la gare de départ par exemple.
Comment passe-t-on d’un train capable de se conduire tout seul à une gestion intelligente de l’ensemble du réseau ?
Il y a deux systèmes différents : la conduite autonome, dont on vient de parler, et la supervision autonome ‒ sachant qu’on peut tout à fait avoir l’un sans l’autre. La supervision autonome, c’est un équipement qui permet de faire des choix dans l’ordonnancement des trains. Par exemple, si deux trains qui doivent se succéder arrivent au même moment à un aiguillage, car l’un des deux est en retard, la supervision pose la question du train à faire passer en premier. Aujourd’hui, cela est très bien géré par des personnes qui s’appuient sur leur expérience, mais on sait qu’on peut optimiser cette tâche, car la profondeur du calcul informatique permet d’avoir une idée des conséquences à plus long terme des décisions qui sont prises.
Comment le train autonome va-t-il s’insérer dans les autres programmes d’innovation de la SNCF, et pour développer quelle vision de la mobilité pour demain ?
Le train autonome est l’une des briques de la troisième révolution du ferroviaire, qui préfigure le train du futur : l’addition d’un système de conduite autonome, d’un système de supervision autonome, d’un système de signalisation du train digitalisé, d’un système d’optimisation de la gestion des ressources… et pour finir, c’est toute l’interface avec le voyageur qui s’appuie sur des outils digitaux pour rendre l’expérience client plus fluide et efficace. Cela va révolutionner la façon d’exploiter les trains, en permettant d’en mettre beaucoup plus sur les mêmes infrastructures, donc de décongestionner le réseau en zones denses et d’offrir beaucoup plus de souplesse en zones moins denses. La digitalisation permet aussi de travailler sur tous les parcours d’approche, de chez soi à la gare par exemple, de façon à rendre l’utilisation du train plus simple pour nos clients. L’objectif est d’étendre à nouveau la pertinence du ferroviaire dans les décennies à venir.
En effet, les niveaux d’automatisme sont expliqués dans la vidéo que je propose d’insérer dans cette partie de l’article.