• Au Japon, une équipe de recherche a développé une IA embarquée qui permet de repérer les voix humaines sous les décombres d’un séisme, en filtrant le bruit généré par le drone.
• En Inde, un essaim de drones a été programmé pour détecter plus rapidement les zones potentielles d’incendie, ce qui a permis sur le terrain de réduire la surface moyenne brûlée de 65%.
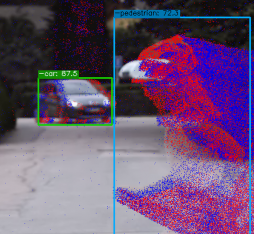
Les drones peuvent survoler des zones géographiques pendant ou après des catastrophes naturelles pour aider les équipes de recherche, par exemple, à repérer les personnes en détresse ou pour définir les zones d’intervention prioritaires. Leurs seules caméras embarquées ne leur permettent cependant pas de détecter les personnes ensevelies sous les décombres après un séisme. Chinthaka Premachandra, professeur en IA, traitement d’images et robotique au Shibaura Institute of Technology de Tokyo, a donc souhaité développer une technologie capable d’entendre les voix humaines depuis des drones pour faciliter la détection des victimes. Cette technologie, d’après lui, « améliore l’efficacité de l’identification des êtres humains à la suite de catastrophes, et renforce aussi considérablement notre capacité à isoler et à amplifier les sons vitaux parmi les bruits non pertinents ».
Si des voix humaines sont présentes dans les enregistrements réalisés par le drone, elles deviennent plus perceptibles en raison de la réduction du bruit du drone
De l’IA embarquée pour supprimer les bruits parasites
Pour ce faire, l’équipe de chercheurs qu’il dirige a développé une technologie d’intelligence artificielle capable de supprimer, entre autres, le bruit généré par le drone. « Un réseau adversarial génératif (GAN) composé de deux réseaux neuronaux — le générateur et le discriminateur — est employé pour générer un pseudo-bruit qui imite le bruit d’un drone. Ces réseaux sont formés simultanément par le biais d’un processus concurrentiel. Plus précisément, le générateur, après avoir été entraîné avec le son réel du drone, est utilisé pour créer un pseudo-bruit. Ce bruit généré est ensuite soustrait du son capturé par le microphone de bord du drone, dans le but de supprimer le bruit du son du drone. » Des voix humaines qui seraient présentes dans les enregistrements réalisés par le drone mais non perceptibles, deviennent ainsi audibles. « À terme, l’objectif est que le générateur produise des données si convaincantes que le discriminateur ne puisse plus faire la différence. Grâce à ce processus, le générateur entraîné est capable de créer des bruits de drones qui imitent fidèlement les sons authentiques des drones. »
L’entraînement du GAN doit cependant être conduit pour chaque drone spécifique, afin que le son reproduit soit le plus proche de la réalité. « Cette tâche peut être accomplie efficacement si l’entraînement est effectué par l’ordinateur de bord du drone. » Pour la détection des victimes de catastrophes, les chercheurs prévoient d’intégrer un haut-parleur dans le drone. « Ce haut-parleur embarqué émettra un son en direction du site de la catastrophe, invitant les victimes présentes à réagir. La détection des victimes est réalisée en excluant le son émis par le haut-parleur embarqué de l’audio capturé par le microphone embarqué, car le microphone enregistre également la sortie du haut-parleur », souligne Chinthaka Premachandra.
Exploration coopérative entre drones contre les incendies
L’équipe du Shibaura Institute of Technology de Tokyo n’est pas la seule à se pencher sur l’usage des drones lors de catastrophes naturelles. À Bengalore, des chercheurs de l’Indian Institute of Science ont développé un algorithme qui permet à un essaim de drones de prendre des décisions autonomes en fonction de l’expansion potentielle et de l’ampleur d’un incendie. Il s’agit en somme d’un système d’exploration coopérative. Grâce à des capteurs thermiques, les drones peuvent détecter rapidement l’emplacement des incendies et comprendre ses délimitations géographiques. Lors d’une expérimentation, les chercheurs indiquent que cette approche « réduit la surface forestière moyenne brûlée de 65% et la durée de la mission de 60% par rapport au meilleur cas des approches multidrones ». En effet, les informations recueillies par certains drones sont utilisées pour communiquer à d’autres drones dans quelle direction poursuivre les opérations de détection et le système est conçu pour qu’il n’y ait aucune redondance dans les tâches affectées à chaque drone.
 Chinthaka Premachandra
Chinthaka Premachandra