• Il détaille le fonctionnement des véhicules autonomes, l’importance de leur connectivité 5G et le rôle de son entreprise dans l’amélioration des technologies LiDAR.
• Valeo a récemment annoncé un système permettant aux véhicules autonomes de se garer seuls dans des parkings, ainsi qu’une collaboration avec l’APRR pour permettre aux véhicules d’être autonomes de l’entrée à la sortie de péage.
Comment expliquer au grand public le fonctionnement d’un véhicule autonome ?
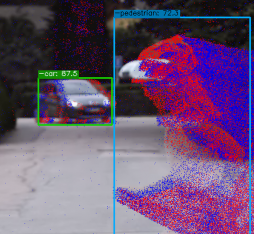
Trois éléments sont essentiels : les capteurs, les calculateurs et les logiciels embarqués. Chez Valeo, on dispose du portefeuille de capteurs le plus large du marché avec des caméras, des radars, etc. à partir du niveau trois, c’est-à-dire quand on bascule sur un système de conduite automatisé où le système devient responsable, et non le conducteur. La particularité du LiDAR, qui est un capteur dit actif, est d’apporter une modalité de perception supplémentaire, basée sur un rayon laser qui mesure l’environnement en le balayant : il mesure le temps que met la lumière à atteindre un objet et ce de jour comme de nuit, ce qui permet de donner des informations très précises. Cela permet d’atteindre les mêmes niveaux de criticité de l’aéronautique et des équivalences en termes d’accidentologie.
Le système de franchissement autonome de barrières de péage suppose au véhicule de disposer des cartographies dynamiques en temps réel des péages en haute définition
Pourquoi la qualité de la connectivité 5G devient-elle essentielle pour ces véhicules ?
La 5G apporte des bénéfices en termes de qualité de service, notamment en « network slicing », une méthode qui permet de garantir une tranche de réseau pour certaines applications. Aujourd’hui il faut comprendre qu’un véhicule autonome est opéré dans un lien de supervision à distance pour que quelqu’un puisse reprendre la main ou télécharger par exemple des éléments de cartographie. Sur un système de niveau trois, si la connectivité n’est pas présente, le véhicule ne pourra pas rentrer en autonomie. Par exemple, nous avons un projet collaboratif avec l’APRR qui est un système de franchissement autonome de barrières de péage. Cela suppose au véhicule de disposer des cartographies dynamiques en temps réel des péages en haute définition, car il y a parfois des voies fermées, des marquages au sol absents, etc. L’objectif est que le véhicule puisse être autonome de l’entrée à la sortie d’autoroute car, jusqu’à présent, les systèmes redonnent la main aux conducteurs au niveau des péages.
Vous avez également développé un système propre à l’assistance au parking…
On travaille sur un système de parking autonome avec BMW. C’est un système de niveau quatre, c’est-à-dire en autonomie totale dans un contexte donné, ici, dans un parking. C’est un système embarqué qui permet de laisser sa voiture à l’entrée du parking d’un aéroport ou encore d’un supermarché et cette dernière ira se garer seule pour ensuite venir vous chercher quand vous en aurez besoin, en totale autonomie. Les systèmes de niveau quatre supposent que le véhicule doit se débrouiller dans les conditions pour lesquelles il a été conçu, qu’elles soient géographiques, atmosphériques, etc. Par exemple, certains systèmes sont conçus pour fonctionner uniquement lors d’embouteillages sur l’autoroute en cas de beau temps.
Les consommateurs ont le sentiment que le marché automobile tarde à adopter ces technologies, pourquoi ?
Aujourd’hui il y a un cadre légal suffisant qui a été décliné dans la loi pour faire du véhicule autonome particulier ou collectif. On parle des niveaux 3 et 4, mais il faut également parler de toutes les aides à la conduite, c’est-à-dire de l’aide au freinage d’urgence, de la prévention de survitesse, etc., qui sont des technologies qui ne remplacent pas le conducteur, mais s’y substituent en cas de défaillance ou de distraction. Ces briques sont issues de toute la recherche et de l’innovation réalisées pour le véhicule autonome, car ce sont des investissements de pointe pour le véhicule autonome qui sont utilisés par tout le monde. À l’inverse, le déploiement à grande échelle de ces technologies permet de réduire le coût des briques technologiques pour que les prix des véhicules autonomes de niveau trois ou quatre puissent ensuite baisser.
Pouvez-vous donner un exemple ?
Les premières navettes tournaient avec des LiDAR qui étaient des instruments de laboratoire à plusieurs dizaines de milliers d’euros. On a développé chez Valeo des LiDAR automobiles suffisamment robustes pour rouler plus de 100.000 km dans des conditions de vibration et température de l’automobile à des prix permettant une diffusion plus importante. Et ces technologies arrivent aujourd’hui sur les véhicules autonomes. Cela va permettre, à terme, de rendre le coût des robots taxis et navettes autonomes plus accessibles.
Niveau :
Les cinq niveaux d’autonomie d’un véhicule sont :
Aide à la conduite (Niveau 1). Exemple : régulateur adaptatif.
Autonomie partielle (Niveau 2). Exemple : assistance au stationnement.
Autonomie conditionnelle (Niveau 3). Exemple : conduite dans les embouteillages.
Autonomie élevée (Niveau 4). Exemple : parking autonome.
Autonomie complète (Niveau 5).
 Antoine Lafay
Antoine Lafay