Résumé
La généralisation de la conduite autonome n’est pas encore une réalité et nécessitera un réseau sans fil fiable, robuste et étendu. Promettant des débits importants et de très faibles latences, la 5G représente l’avenir des véhicules autonomes. Avec un déploiement prévu dès 2020, les communications véhiculaires ou communications V2X (Vehicule-to-Everything) permettent de faire interagir en temps réel les véhicules avec leur environnement afin d’améliorer la sécurité routière, l’efficacité du trafic et les économies d’énergie.
La recherche d’Orange sur la mobilité connectée basée sur les réseaux cellulaires s’est concentrée à partir de 2016 sur deux projets de recherche : Towards5G, en partenariat privé avec Ericsson et le groupe PSA, puis 5GCAR, un projet collaboratif financé par la Commission européenne.
Trois cas d’usage ont été retenus au sein du projet 5GCAR : la « Lane merge coordination », insertion assistée sur une voie, la « Cooperative perception », perception coopérative entre véhicules, et la « Vulnerable road user protection », protection des usagers vulnérables (piétons, cyclistes…).
Dans le cadre du projet 5GCAR, les premiers cas d’usage en matière d’ITS (Intelligent Transport Systems) coopératifs utilisant la future technologie cellulaire 5G ont été définis et sont en cours de validation en France.
Article complet
La généralisation de la conduite autonome n’est pas encore une réalité et nécessitera un réseau sans-fil fiable, robuste et étendu. Promettant des débits importants et de très faibles latences, la 5G représente de manière substantielle l’avenir des véhicules autonomes, favorisant demain la coopération entre. Des expérimentations sont actuellement menées en France et partout dans le monde permettant de valider cette perspective.
Au sein d’Orange, les études sur la mobilité connectée basée sur les réseaux cellulaires ont débuté il y a plus de dix ans. Elles se sont enrichies au sein de plusieurs projets collaboratifs nationaux et européens (SCORE@F, SCOOP, 5GCar, 5GCroco) [1] et au travers de partenariats avec les principaux acteurs du domaine des véhicules connectés (équipementiers télécoms, constructeurs automobiles).
Les possibilités d’offrir et de conserver la meilleure connectivité sans coupure (HomeAgent, routeur mobile, DSMIP) [2] pour les véhicules connectés ainsi que d’échanger des messages avec son environnement ont été mises en œuvre et validées dans ces projets, démontrant comment les réseaux mobiles de demain permettront d’offrir des services de sécurité pour le véhicule connecté.
Avec un déploiement prévu dès 2020, les communications véhiculaires ou communications V2X (pour Vehicule to Everything [3]) permettent de faire communiquer en temps réel les véhicules avec son environnement afin d’améliorer la sécurité routière, l’efficacité du trafic et les économies d’énergie. La figure suivante illustre les différents modes de communication regroupés sous le terme V2X.
Les différents modes de communication V2X
Des premiers cas d’usage prometteurs issus du partenariat Towards5G
Après s’être intéressée aux problématiques d’hybridation entre communications véhiculaires directes (ITS G5) et cellulaires (LTE), la recherche d’Orange s’est concentrée à partir de 2016 sur des projets de recherche de la 5G appliquée aux véhicules connectés : Towards5G dans un premier temps, puis 5GCAR.
Dans le cadre de l’initiative « Towards5G » [1], réalisée en partenariat privé avec Ericsson et PSA, un réseau expérimental a été déployé en France pour tester des applications véhiculaires mettant en jeu des communications cellulaires V2X et estimer les performances obtenues. Ce réseau s’appuie sur un cœur de réseau LTE Ericsson évolué doté de fonctionnalités préfigurant la future 5G, telles que le “network slicing” [4] qui permet d’isoler différents flux et le “local breakout” [5] qui permet de baisser drastiquement la latence. Un serveur dédié aux échanges de messages géolocalisés entre véhicules a également été mis en place.
Développés par Orange, des routeurs mobiles (On-Board Unit-OBU) sont embarqués dans les véhicules permettant de les connecter au réseau LTE ainsi que de connaitre leurs positions et paramètres dynamiques grâce à un module GNSS [6]. Une tablette, intégrant une interface graphique Orange et embarquée dans le véhicule, offre la possibilité de visualiser les informations provenant du routeur mobile et de tester les cas d’usage développés dans le partenariat.
Afin d’illustrer le potentiel de la technologie 5G pour améliorer la connectivité véhiculaire au travers des réseaux cellulaires, deux principaux cas d’usage ont été développés : “emergency vehicle approach warning” soit l’alerte d’approche d’un véhicule d’urgence, et le “see through” soit la vision à travers un véhicule.
Le cas d’usage “Emergency Vehicle Approach Warning” a pour but de prévenir un conducteur de l’arrivée d’un véhicule d’urgence avant que celui-ci ne soit visible, car trop éloigné ou situé dans une rue adjacente. Pour ce faire, le véhicule d’urgence connecté envoie sa position au serveur grâce à son routeur mobile, lequel va indiquer si son gyrophare est activé ou non. Le serveur redistribue le message de position du véhicule d’urgence aux véhicules alentours, lesquels alertent leur conducteur de cette position si le gyrophare est activé.
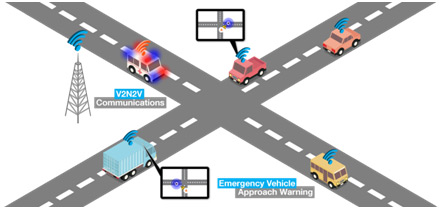
Towards5G : cas d’usage “Emergency Vehicle Approach Warning”
Les messages de positon des véhicules échangés étant de taille réduite, l’intérêt ici est d’avoir une latence la plus faible possible grâce au “local breakout”. Le “network slicing” sert à garantir une séparation des flux entre la partie véhiculaire critique et la partie multimédia.
Le second cas d’usage développé dans le partenariat Towards5G propose au conducteur d’un véhicule de voir « au travers » du véhicule qui le précède et lui obstrue la vue, pour permettre un dépassement par exemple. Pour cela un véhicule équipé d’une caméra haute définition reliée au routeur mobile, peut transmettre le flux vidéo sur requête automatique du routeur mobile d’un véhicule suiveur. Le flux vidéo est ensuite transmis en local breakout sur le slice véhiculaire, garantissant une faible latence.
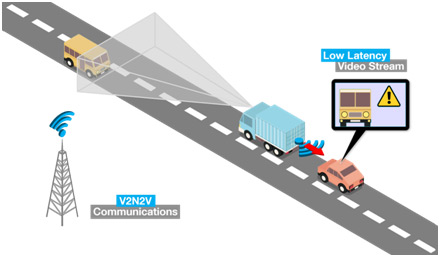
Towards5G : cas d’usage “See Trough”
La principale limite de ce cas d’usage développé sous cette forme réside dans le fait d’être très consommateur en bande passante. Cependant il a l’avantage de montrer de manière très visuelle les performances du slice véhiculaire en termes de faible latence et de conservation du débit, comparé au slice “mobile broadband” qui est affecté en premier en cas de dégradation des performances radio et réseau. La vidéo suivante illustre ce cas d’usage.
5GCar : un projet 5G V2X européen
Au contraire de Towards5G qui était un projet privé réalisé sur fonds propres, 5GCcar est un projet collaboratif de plus grande ampleur, financé par la Commission Européenne dans le cadre du Partenariat Public-Privé 5G (5G-PPP) et réunissant une douzaine d’acteurs originaires de 5 pays européens, dont les 3 principaux équipementiers réseaux que sont Ericsson, Nokia et Huawei Allemagne ; deux constructeurs automobiles, PSA et Volvo ; des équipementiers automobiles ; plusieurs centres de recherches, PME et universités, ainsi qu’un opérateur de réseaux : Orange.
Fort de l’expérience avec Towards5G, la recherche d’Orange a contribué au projet en proposant une évolution du routeur mobile pour équiper les véhicules des constructeurs automobiles. Orange a également œuvré à la conception d’une plate-forme applicative V2X générique permettant d’échanger des messages entres véhicules et avec différents modules applicatifs hébergés dans le réseau, et de servir tous les cas d’usages développés dans le cadre du projet.
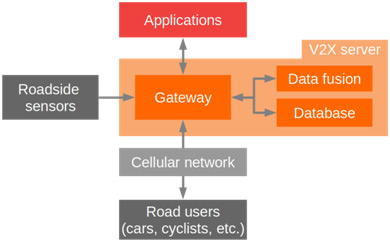
Synoptique de l’architecture applicative V2V générique du projet 5GCar
De nouveaux cas d’usage
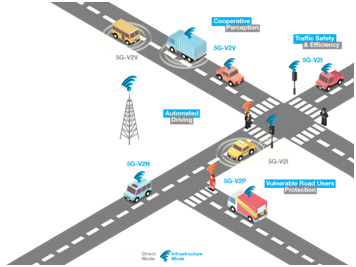
Trois cas d’usage ont été retenus dans le cadre du projet 5GCAR [1] : le “Lane Merging”, insertion assistée sur une voie, le “Cooperative Perception” perception coopérative entre véhicules, et le “Vulnerable road users protection” protection des usagers vulnérables que sont les piétons et les cyclistes.
“Lane Merging” consiste à assister un véhicule autonome et connecté à l’insertion sur une voie rapide. Ceci est rendu possible par le “traffic orchestrator”, un module applicatif hébergé dans le réseau et connecté au serveur V2X qui récupère les positions et paramètres dynamiques des véhicules présents sur la voie rapide, et propose des trajectoires aux véhicules souhaitant s’insérer et à ceux qui se trouvent dans la zone d’insertion afin d’optimiser la fluidité du trafic et de faciliter l’insertion.
Si les véhicules connectés communiquent en permanence leur position au serveur V2X et sont donc pris en compte par l’orchestrateur, les véhicules non connectés sont eux repérés par des caméras « intelligentes » disposées aux abords de la zone d’insertion et détectant les positions de tous les véhicules grâce à des techniques de traitement d’image en faisant appel notamment à l’intelligence artificielle [7]. Les données de ces caméras sont ensuite envoyées au serveur V2X, dans lequel un module de fusion de données les compare aux données remontées par les véhicules connectés afin d’éviter les doublons.
Le but de ce cas d’usage est de montrer les avantages d’une solution cellulaire à faible latence pour permettre une organisation du trafic routier, qui ne serait pas possible avec un système purement direct comme l’ITS G5 [8].
“Cooperative Perception”, second cas d’usage, est séparé en deux parties. La première est un “see through” V2V amélioré par rapport à celui développé pour Towards5G, dans le sens où il fait appel à une radio évoluée, basée sur la technologie 5G, permettant de transmettre de la vidéo haute définition à des débits plus importants et des latences encore plus faibles.
La deuxième partie a toujours pour but d’utiliser une caméra embarquée dans un véhicule, mais en accompagnant cette fois la caméra d’une unité d’analyse d’image qui détecte les véhicules dans son champ de vision et les transmet sous forme d’objets au routeur mobile. Ces objets sont ensuite envoyés au serveur V2X pour permettre leur diffusion aux véhicules connectés situés aux alentours. C’est une autre forme de perception coopérative, à plus longue portée, avec une gestion différente de la bande passante et plus à même d’être exploitée par des véhicules autonomes et des applications routières utilisant les données du serveur V2X. La 5G doit permettre le passage à l’échelle de ce genre de solution, tout en gardant des latences faibles garantes de la pertinence et de la précision des données échangées.
“Vulnerable Road Users Protection”, troisième cas d’usage implémente une solution de détection des usagers vulnérables grâce à un système de triangulation par radio 5G. Les piétons et cyclistes équipés d’un terminal 5G sont localisés par le système, traduits sous formes d’objets et envoyés au serveur V2X pour permettre leur diffusion auprès des véhicules. Le dispositif est complété par un module de détection de collision (développé par Nokia) connecté au serveur V2X, qui récupère les données des véhicules et des usagers vulnérables et leur envoie des alertes de collision au travers du serveur en cas de danger.
Pour ces trois cas d’usage, Orange fournit les routeurs mobiles et l’interface graphique permettant leur présentation lors des démonstrations, en plus d’avoir œuvré à la définition de messages communs et à l’utilisation d’un même serveur V2X. Le projet 5GCar permet de démontrer la pertinence d’une telle architecture pour répondre à de nombreux cas d’usage.
Les acteurs s’organisent
Dans le cadre du projet collaboratif européen 5GCar, les premiers cas d’usage en matière d’ITS coopératif utilisant la future technologie cellulaire 5G ont été définis et sont actuellement en cours de validation en France.
Au-delà de ce projet européen, les opérateurs expérimentent en étroite collaboration avec le secteur automobile. Cette collaboration s’est organisée avec la création en 2016 de la 5G Automotive Association (5GAA), qui réunit des opérateurs (Orange, Deutsche Telekom, AT&T, …), des équipementiers de télécommunications (Ericsson, Nokia…) et des fabricants de semi-conducteurs (Qalcomm, Samsung, …) ainsi que des constructeurs (PSA, Volvo, Volkswagen, …) et des équipementiers automobiles (Bosch, Continental, …).
Au niveau européen, d’autres collaborations entre ces acteurs ont été lancées fin 2018 au sein du projet 5GCroCo. D’une durée prévue de 3 ans, ce projet fait la part belle aux pré-déploiements 5G pour le cellular V2X et se consacre à la réalisation de tests à grande échelle pour la voiture coopérative, connectée et autonome dans le corridor transfrontalier européen 5G reliant les villes de Metz (en France), de Merzig (en Allemagne) et de Luxembourg. Dans ce cadre, trois cas d’utilisation liés aux services CCAM (Cooperative, Connected and Autonomous Mobility) seront testés : l’évitement de collision coopératif anticipé, la génération et la distribution dynamiques de cartes haute définition pour la conduite autonome et la conduite à distance. 5GCroCo dispose d’un budget total de près de 17 millions d’euros pour une contribution de la Commission Européenne proche de 13 millions d’euros. Il regroupe 24 partenaires issus de 7 pays européens.
En savoir plus :
[1] les projets collaboratifs et partenariats autour de la mobilité connectée dont Orange est/a été partenaire :
SCOOP
SCORE@F
5GCar
5GCroCo
Towards5G
[2] Pour offrir une connectivité sans couture, la recherche d’Orange a développé et fait évoluer une solution s’appuyant sur le protocole DSMIP (Dual Stack (IPv4 et IPv6) Mobile IP, basé sur la RFC5555 de l’IETF, le protocole DSMIP est un protocole de mobilité client-serveur) :
– le Home Agent ou HA est l’entité serveur du protocole DSMIP. Le HA peut être implémenté comme une fonctionnalité logique au sein d’une entité réseau existante ou directement comme une entité indépendante. Son rôle est de maintenir et de sélectionner la meilleure connectivité de chaque routeur mobile.
– le routeur mobile ou OBU (On-Board Unit) est un routeur embarqué à bord d’un véhicule, c’est l’entité client du protocole DSMIP. Ce routeur est chargé de fournir de la connectivité et des services au véhicule. Il utilise toutes les technos d’accès qu’il a à sa disposition et est capable de basculer de l’une à l’autre sans coupure réseau.
[3] Le terme V2X désigne une communication entre le véhicule et son environnement.
L’environnement peut désigner :
– les autres véhicules, bien entendu, quelle que soit leur marque, on parle alors de V2V.
– l’infrastructure, dont les feux et panneaux de signalisation, on parle alors de V2I.
– les piétons, on parle alors de V2P
– et même le réseau de téléphonie mobile, on parle alors de V2N
Il est important de noter que ces acronymes ne cessent de s’enrichir à mesure que de nouveaux modes de communications véhiculaires apparaissent. Pour le moment, par exemple, aucun terme ne désigne les communications entre le véhicule et les cyclistes mais il y a fort à parier que d’autres sigles enrichissent les communications V2X très prochainement.
[4] Network slicing : « Une connectivité 5G innovante pour les véhicules connectés »
[5] 3GPP TS 22.278 : https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=641
[6] Système de positionnement par satellites
[8] https://www.etsi.org/deliver/etsi_en/302600_302699/302663/01.02.00_20/en_302663v010200a.pdf