

● Ce champ de recherche progresse lentement au regard des défis techniques, tels que la taille des muscles artificiels et les besoins en nutriments des muscles.
● Malgré ces obstacles, l’intelligence artificielle aide à optimiser les processus de fabrication, pour modéliser en amont le volume de cellules et leur géométrie.
Des robots mi-mécaniques, mi-vivants pourraient se déplacer sans avoir besoin de se recharger, voire offriraient des opportunités par exemple dans le domaine médical, avec des prothèses constituées de tissus musculaires, plus adaptées pour l’homme. Ils pourraient également offrir des capacités de mouvement inédites pour des applications de précision. L’idée de la robotique biohybride consiste ainsi à remplacer des articulations mécaniques par des muscles. Cette approche a notamment fait parler d’elle fin juin 2024 lorsque l’Université de Tokyo a présenté une technique permettant de lier des tissus vivants à une structure inorganique, comme des ligaments. Cette innovation a permis à un petit visage robotique rose conçu à partir de tissus vivants de bouger en trois dimensions, en soulevant ses joues pour mimer un sourire.
Ces robots seraient capables de répliquer la dextérité, l’adaptabilité et l’efficacité énergétique que l’on trouve dans le vivant.
Des applications théoriques prometteuses
Avant d’imaginer des robots humanoïdes biohybrides aussi réalistes que dans la série Westworld, il faudra encore attendre : « Aujourd’hui 99% du champ de recherche de la robotique biohybride se concentre sur l’actuation, à savoir les mécanismes d’actionnement, et plus précisément sur les bioactuateurs », explique Miriam Filippi, responsable d’équipe en robotique molle à l’École polytechnique fédérale de Zurich. « On peut en effet cultiver des tissus en laboratoire à partir de cellules souches afin de répliquer des fonctions musculaires et intégrer ces matériaux dans un robot. Ces dispositifs sont basés sur des tissus et donc multicellulaires, mais il est possible de fabriquer des microrobots qui se déplacent grâce à des organismes unicellulaires tels que des bactéries. » L’avantage pour la robotique est que, théoriquement, les cellules peuvent s’assembler et se démultiplier à n’importe quelle échelle. Cela offrirait des caractéristiques inédites aux robots. « Ils seraient capables de répliquer la dextérité, l’adaptabilité et l’efficacité énergétique que l’on trouve dans le vivant », ainsi que la capacité de s’autoguérir, d’être silencieux ou biodégradables. « Ils pourraient également disposer de fonctions complexes propres à l’homéostasie, c’est-à-dire la capacité à percevoir des signaux environnementaux et s’y adapter. » Voilà pour la théorie. Dans la pratique, le déploiement de muscles artificiels de grande taille sur la durée est bien plus complexe.
Un champ de recherche confidentiel face à des défis techniques
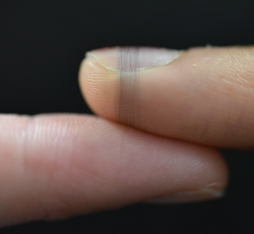
« Aujourd’hui, nous ne sommes pas encore capables de faire des actuateurs biohybrides plus grands qu’1 centimètre sur une seule dimension, car les cellules doivent être dans un environnement qui contient les nutriments nécessaires à leur survie. Par ailleurs, on ne peut pas générer une force supérieure à quelques micronewtons, voire de quelques millinewtons. » Le processus pour concevoir des dispositifs biohybrides est par ailleurs excessivement onéreux et peu écologique et nécessite des conditions de laboratoire spécifiques qui expliquent que peu d’universités se penchent pour l’heure sur le sujet. « On parle d’itérations longues car, pour générer un seul muscle, il faut jusqu’à trois semaines. » Pour l’heure, seuls une demi-dizaine de groupes de recherche dédiés à ces sujets sont recensés dans le monde.
« Malgré ces limites, le machine learning peut nous aider à choisir les bonnes cellules et les paramètres à l’entrée pour optimiser les processus de fabrication. » En d’autres termes, l’intelligence artificielle permet de simuler le nombre de cellules nécessaires pour la conception d’un muscle et la géométrie de leur « assemblage » avant de faire des essais en laboratoire pour obtenir un résultat spécifique. « Nous progressons dans le sens d’être en mesure de répliquer ce que fait la nature. » Reste que, pour l’heure, les systèmes biohybrides ne peuvent fonctionner que dans des environnements liquides et les cellules meurent si elles sortent d’un laboratoire. Il faut donc concevoir des systèmes capables de protéger les muscles et de les nourrir.
Vers des systèmes plus intelligents
Certains systèmes de robotique biohybride sont stimulés par des signaux électriques ou optiques et d’autres sont en mesure désormais de se contracter seuls. « De notre côté, nous souhaitons développer des systèmes de contrôle pour des systèmes intelligents et autonomes, c’est-à-dire en faisant rentrer des capteurs dans le muscle, pour que ce dernier soit en mesure de comprendre son propre niveau de contraction et donc de décider ce qu’il doit faire ensuite », explique Miriam Filippi. Ce type de contrôle dynamique permettrait de réguler les contractions musculaires et les stimulus envoyés aux muscles. « Cela deviendrait davantage un robot biohybride qu’un simple bioactuateur. »
Image : Laboratoire de robotique molle – École polytechnique fédérale de Zurich (chef de laboratoire : Robert Katzschmann (absent de la photo). De gauche à droite : Jose Greminger (étudiant en master), Pablo Paniagua (étudiant en master), Jakob Schreiner (doctorant invité), Aiste Balciunaite (doctorant), Miriam Filippi (chercheuse confirmée) et Asia Badolato (doctorante).
 Miriam Filippi
Miriam Filippi