

• A l’Inria Rennes, le chercheur Macro Tognon étudie également la conception de drones autonomes capables de coopérer pour transporter des charges lourdes. Une approche plus sécurisée que si cette tâche était exécutée par un unique drone de large taille.
• A l’ETH Zurich, une équipe a développé un design de drone capable d’évoluer dans des végétations denses et de glisser sur les obstacles rencontrés pour faciliter des usages comme la surveillance de l’environnement ou l’agriculture de précision.
Sur le papier, les drones pourraient apporter beaucoup à l’industrie et au monde de la construction.
- Ils ont le potentiel de réaliser des tâches risquées pour l’homme, de transporter par exemple des objets en altitude pour des travaux sur des éoliennes ou des lignes à haute tension. Une société comme FlingBasket commercialise ainsi un drone dit « cargo » capable de soulever des charges allant jusqu’à 100 kilos. « Plus la taille augmente, moins le système est sécurisé », observe cependant Marco Tognon, membre de l’équipe de robotique de l’Inria Rennes. Il est d’après lui préférable, pour des raisons de sécurité, de disposer de plusieurs petits drones que de gros drones : « Nous travaillons également à concevoir des systèmes 100% autonomes de flotte de drones capables de transporter des objets de manière coopérative. Chaque drone peut porter jusqu’à 1kg de charge. »
- Dans le domaine de la construction, les drones se cantonnent actuellement à un rôle d’inspection grâce à la computer vision, voire de modélisation grâce à des radars LiDAR. L’acquisition de nouvelles capacités passe par une technologie complexe. Le chemin à parcourir avant de pouvoir réaliser de réelles « interactions physiques aériennes » reste long. Ces interactions sont le domaine de recherche privilégié de Marco Tognon : « Le problème est que les robots aériens que l’on trouve dans le commerce ne peuvent rester que dans une seule position, c’est-à-dire à plat et, pour bouger, ils doivent s’incliner. ».
Il a fallu complètement modifier le design des drones et, notamment, pouvoir orienter l’angle des hélices pour contrôler indépendamment la position et l’orientation d’un drone
Collaborer avec les humains et transporter des charges de manière autonome
Si un drone souhaite prendre une mesure en altitude grâce à un capteur de surface, par exemple pour mesurer l’épaisseur d’un mur, il doit pouvoir exercer une force sur cette surface, et rester parfaitement immobile pendant toute la durée de la mesure. C’est ce que propose la startup Voliro, qui est née à l’ETH Zurich, où Marco Tognon a réalisé son postdoctorat. « Il a fallu complètement modifier le design des drones, et notamment, pouvoir orienter l’angle des hélices afin de contrôler complètement la position et l’orientation d’un drone de manière indépendante. C’est un prérequis si on souhaite exercer une force contre un autre solide. » Le jeune chercheur souhaite aller plus loin, en analysant comment un drone peut manipuler l’environnement ; un drone doté d’articulations, par exemple, pourrait ouvrir des valves. Il estime que des systèmes opérationnels de ce type arriveront sur le marché dans cinq à six ans. « L’objectif est également de concevoir des interactions avec des systèmes dynamiques, y compris des humains, pour collaborer avec eux, par exemple pour transporter des tuyaux, ou venir apporter des outils si l’ouvrier est en altitude, etc. »
Appréhender des obstacles différemment
Les drones peuvent également être utilisés pour surveiller l’environnement, comme l’avait démontré l’ETH Zurich en janvier 2023, avec un drone capable de prélever de l’ADN environnemental (eDNA) grâce à des bandes adhésives. Les chercheurs ont poursuivi leurs travaux pour améliorer la capacité des drones à interagir avec les obstacles présents dans la nature. « Les robots aériens perçoivent la végétation comme des obstacles à éviter. Cependant, les branches, brindilles et feuilles denses mais souples pourraient potentiellement être traversées en utilisant une interaction physique directe » indiquent-ils dans la revue Nature.
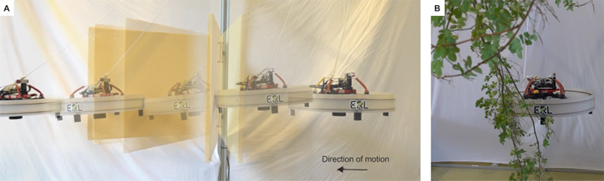
Figure A : le robot aérien suit une trajectoire donnée et traverse une plaque articulée dont les paramètres lui sont inconnus. Il suit la trajectoire souhaitée pendant l’interaction, en poussant et glissant sur la plaque pour suivre sa trajectoire. Sur la Figure B, la même expérience a été reproduite avec une branche.
Ils proposent ainsi, le design, inspiré de la nature, d’un drone minimaliste capable de traverser des obstacles dont les réponses élastiques sont inconnues. Grâce à une coque discoïdale, ce drone détecte les contacts environnants avant de de glisser le long des obstacles. Les drones peuvent ainsi évoluer dans des zones où la végétation est dense, pour des usages dans la surveillance de l’environnement, l’agriculture de précision, la recherche et les opérations de sauvetage.
 Marco Tognon
Marco Tognon